Mais le facteur limitant est bien la faible gravité des lunes. Sur planètes, je pense que tu peux titiller les 40 m/s safe, c'est ce que je fais sur Kerbin
vitesse des Rovers
-
Dakitess

- Messages : 6954
- Inscription : 25 janvier 2013, 02:17
- Localisation : Ile de France
- Contact :
Re: vitesse des Rovers
Ha merde, je pensais avoir expérimentalement testé 22 m/s... Je dois confondre.
Mais le facteur limitant est bien la faible gravité des lunes. Sur planètes, je pense que tu peux titiller les 40 m/s safe, c'est ce que je fais sur Kerbin
Mais le facteur limitant est bien la faible gravité des lunes. Sur planètes, je pense que tu peux titiller les 40 m/s safe, c'est ce que je fais sur Kerbin
-
Dragoon1010

- Messages : 2841
- Inscription : 10 mars 2013, 05:59
- Localisation : Géolocalisation en cours...Veuillez patientez...
- Contact :
Re: vitesse des Rovers
Non, les roues pneumatiques sont bien à 60m/s (CF:: Ma vidéo avec Stericraft sur les véhicules terrestre totalement WTF). Les toutes petites sont à 20m/s et les grosses il me semble que c'est 40m/s.

-
Platinium773

- Messages : 909
- Inscription : 06 mars 2013, 11:14
- Localisation : Ici
- Contact :
Re: vitesse des Rovers
Nop les grosses c'est 30m/s =p les petites 20m/s les pneumatiques 60m/s et train d'attérrissage, beaucoup m/s
"Wo Dares Wins" - "Through Adversity to the Stars" - "First In Deed" - All of KABC's ideals
-
Dakitess
- Messages : 6954
- Inscription : 25 janvier 2013, 02:17
- Localisation : Ile de France
- Contact :
Re: vitesse des Rovers
Ha voui, ca devait être les petites que je testais. Par contre, sans doute possible, j'ai amené les petites à plus que 20 m/s A savoir précisément 21.9 m/s, si mes souvenirs sont bons. Je ne saurais expliquer pourquoi, c'était sur la piste, en m'aidant d'une propulsion pour atteindre cette vitesse, naturellement. Mais elles n'ont pas pété à 20 comme je m'y attendais !

Re: vitesse des Rovers
Bon j'ai rajouté 2 roues (pour pas trop modifier mon rover, sinon j'en aurais mis 2 de plus devant), un moteur ionique et j'ai pu faire quelques centaines de mètres autour des 30m/s, les RCS Thrusters activés de temps en temps pour plaquer l'engin au sol.
 Puis une perte de contrôle m'a fait partir en tonneau à 10m du sol sur 200m, j'ai presque réussi à le rattraper puis finalement l'atterrissage m'a crevé 3 roues
Puis une perte de contrôle m'a fait partir en tonneau à 10m du sol sur 200m, j'ai presque réussi à le rattraper puis finalement l'atterrissage m'a crevé 3 roues 
PRIME_BBCODE_SPOILER_SHOW PRIME_BBCODE_SPOILER: screen 1920x1080
-
Platinium773
- Messages : 909
- Inscription : 06 mars 2013, 11:14
- Localisation : Ici
- Contact :
Re: vitesse des Rovers
Perso sur la mun en mode normal je suis monté à 23m/s avec les petites et j"ai eu un crash avec le train d'atterrisage sur la mun à 85m/s =p(J'ai pas réussi a installer ISAmap ou le nom qui s'en rapproche ='( )
"Wo Dares Wins" - "Through Adversity to the Stars" - "First In Deed" - All of KABC's ideals
Re: vitesse des Rovers
Pour installer les mods j'utilise KSP Mod Manager : http://forum.kerbalspaceprogram.com/sho ... od-Manager
Pas besoin de se casser la tête à installer les fichiers à la main.
Pas besoin de se casser la tête à installer les fichiers à la main.

Re: vitesse des Rovers
Je suis en train de mettre au point un rover qui soit à la fois stable et rapide.
Pour l'instant, ça donne ceci :
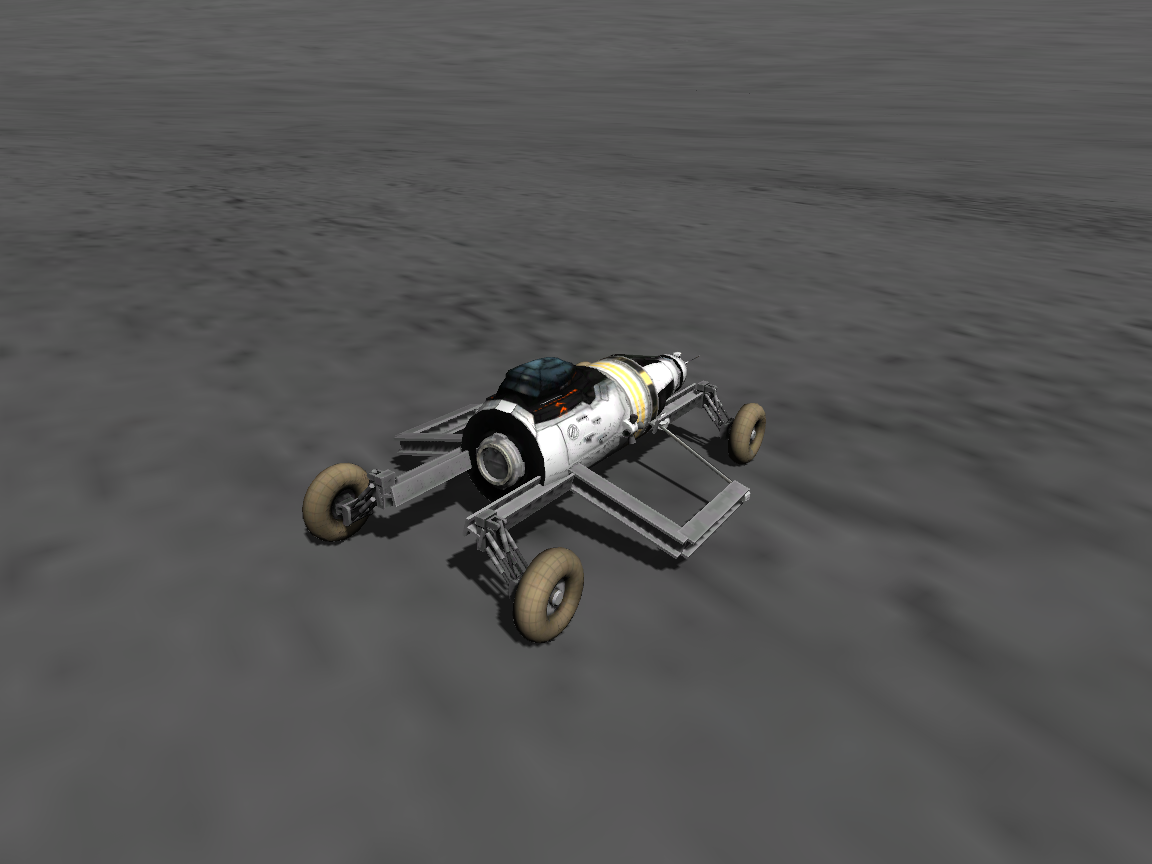

 -> Les barres sur le côté sont un système anti-retournement. Je vais voir à terme si c'est vraiment indispensable.
-> Les barres sur le côté sont un système anti-retournement. Je vais voir à terme si c'est vraiment indispensable.
-> Le module SAS en pointe permet de donner une excellent stabilité une fois enclenché, l'engin va droit et retombe sur ses pattes après chaque saut.
-> Les RCS permettent de donner un petit coup de boost quand la pente est forte (même si la route est droite...).
-> Je vais voir si je peux supprimer les poutres arrières.
-> L'engin est lourd, et centré relativement bas. Ca donne de la stabilité supplémentaire et surtout une inertie phénoménale une fois sur la Mun.Quand l'engin est lancé, il parcourt des km sans dépenser la moindre énergie !
-> J'attends les 50m/s sans efforts.
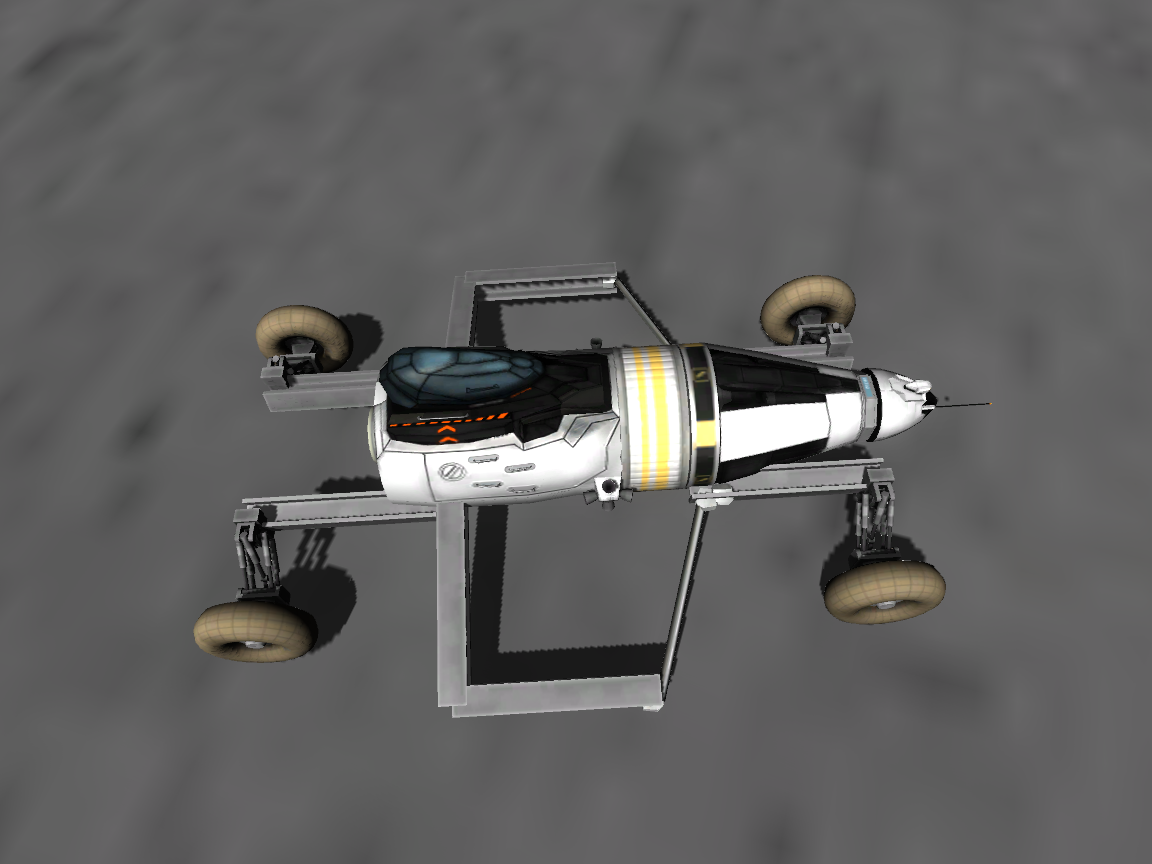
Edit :
Version définitive. Je le tiens jusqu'à 50m/s (y compris en temps x2), après, ça devient chaud.
 Si vous voulez tester...
Si vous voulez tester...
http://tigroukam.free.fr/Hotel/KSP/Ship ... 20M3.craft
Edit::Dragoon1010 : Merci d'éviter les doubles post, édit plutôt ton précédent post .
.
Pour l'instant, ça donne ceci :
PRIME_BBCODE_SPOILER_SHOW PRIME_BBCODE_SPOILER:
-> Le module SAS en pointe permet de donner une excellent stabilité une fois enclenché, l'engin va droit et retombe sur ses pattes après chaque saut.
-> Les RCS permettent de donner un petit coup de boost quand la pente est forte (même si la route est droite...).
-> Je vais voir si je peux supprimer les poutres arrières.
-> L'engin est lourd, et centré relativement bas. Ca donne de la stabilité supplémentaire et surtout une inertie phénoménale une fois sur la Mun.Quand l'engin est lancé, il parcourt des km sans dépenser la moindre énergie !
-> J'attends les 50m/s sans efforts.
Edit :
Version définitive. Je le tiens jusqu'à 50m/s (y compris en temps x2), après, ça devient chaud.
PRIME_BBCODE_SPOILER_SHOW PRIME_BBCODE_SPOILER:
http://tigroukam.free.fr/Hotel/KSP/Ship ... 20M3.craft
Edit::Dragoon1010 : Merci d'éviter les doubles post, édit plutôt ton précédent post

Qui est en ligne ?
Utilisateurs parcourant ce forum : Aucun utilisateur inscrit