Bonjour à tous,
Ce post présente les préparatifs de la mission scientifique "La Kérouse", à destination de Eve et avec retour des échantillons vers Kerbin. En raison des contraintes imposées par la CPU (Commission Publique Unilatérale) la planification s'est focalisée sur un lanceur de moins de 1000 tonnes et 700 éléments. Cet objectif semble pouvoir être atteint grâce aux dernières techniques de simulation et d'optimisation des vaisseaux, des trajectoires de vol et par un recours au freinage atmosphérique avec circularisation sur orbite de parking à Eve.
Par ailleurs des objectifs de standardisation ont été fixés pour la conception de l'a-eve-isseur, afin de limiter son encombrement à un anneau "une couche" et son nombre d'étages à 6
1.Synoptique
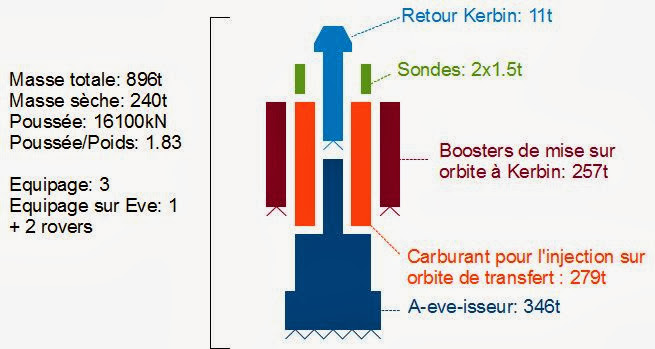
Le lanceur est composé de 5 éléments principaux:
- deux sondes d'exploration pour l'analyse de l'atmosphère et de la surface d'Eve,
- un a-eve-isseur chargé de déposer un kerbonaute et deux véhicules à proximité des sondes, puis de collecter et ramener les données, les échantillons et le brave kerbonaute sur orbite basse,
- un module de retour et d'assistance restant sur orbite (équipage trois kerbonautes),
- des réservoirs de carburant pour l'injection sur orbite de transfert et les manœuvres à Eve,
- des boosters d'appoint pour la satellisation du vaisseau sur orbite basse à Kerbin.
Afin de respecter les objectifs de masse, la mission est fondée sur la ré-utilisation des moteurs de l'a-eve-isseur pour l'ascension à Kerbin et l'injection sur orbite de transfert à Eve.
1.1.Satellisation sur LKO (Low Kerbin Orbit)
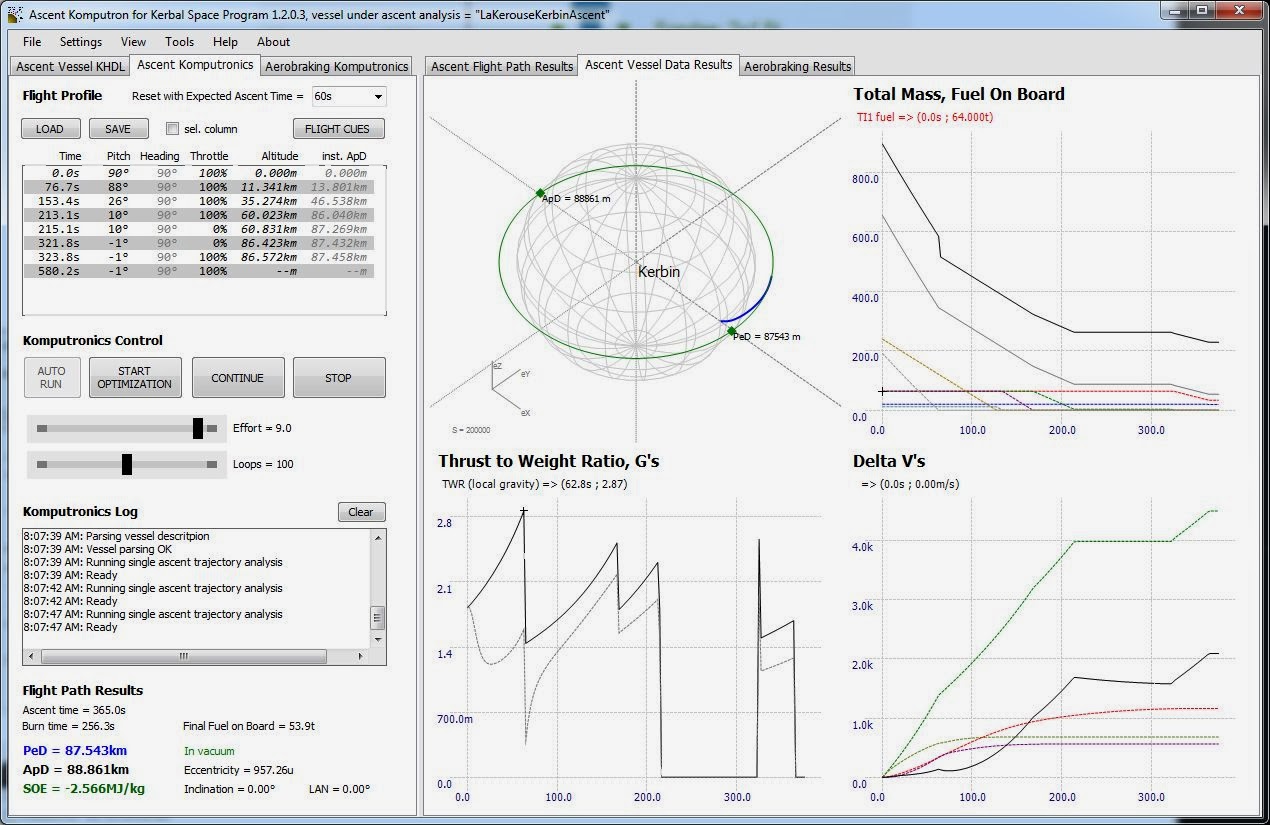
Malgré la masse élevée de 896t la satellisation est obtenue en deux étages uniquement, la structure de l'a-eve-isseur devant absolument être préservée en vue de son utilisation future à Eve. Cela est rendu possible par:
- le rapport poussée / poids (RPP) très élevé de l'a-eve-isseur, qui conçu pour Eve (gravité 1.7G) délivrerait en moyenne un RPP de 2.7 à Kerbin,
- l'adjonction d'un étage extérieur de 9000kN (6x Rockomax Mainsails, 32t de carburant chacun), qui fournit une poussée auxiliaire le temps que la masse du lanceur total soit suffisamment réduite pour être gérée par les seuls moteurs de l'a-eve-isseur, soit 62.8s
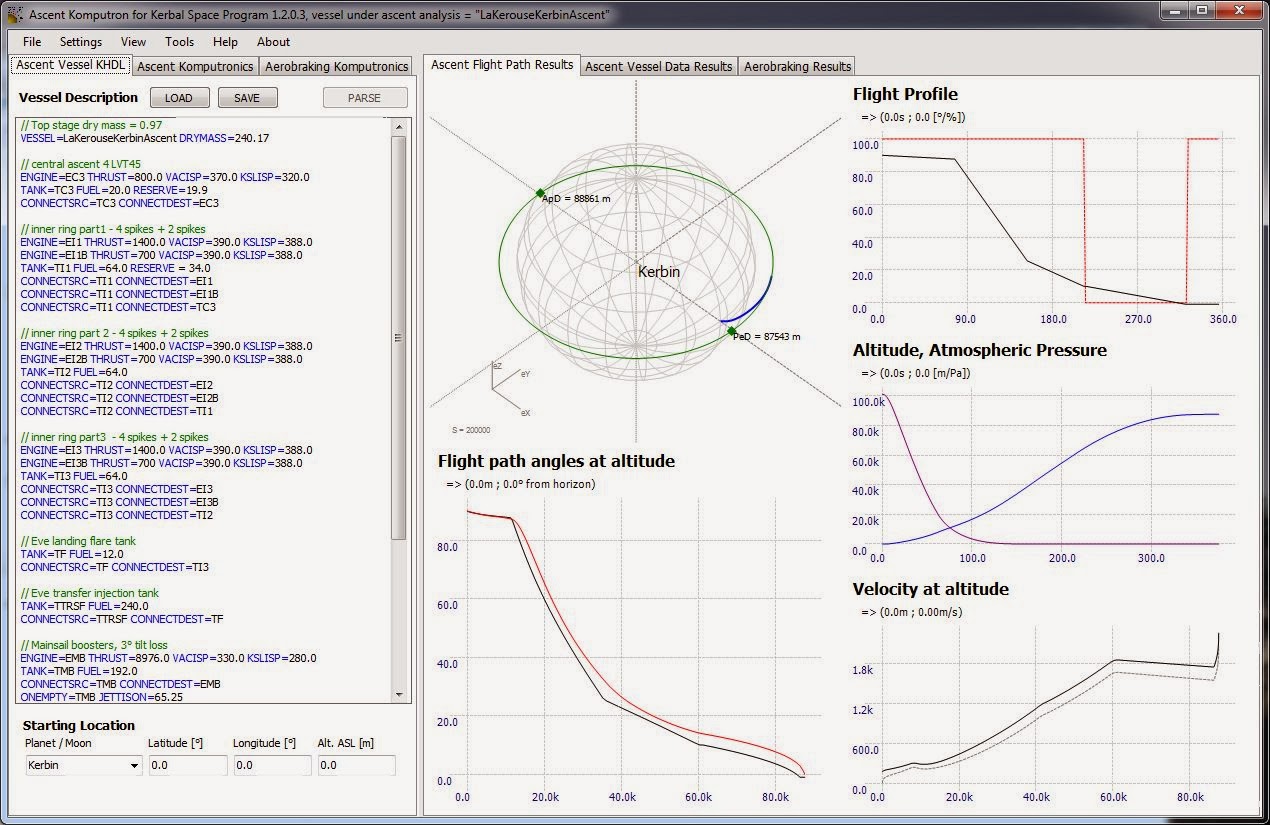
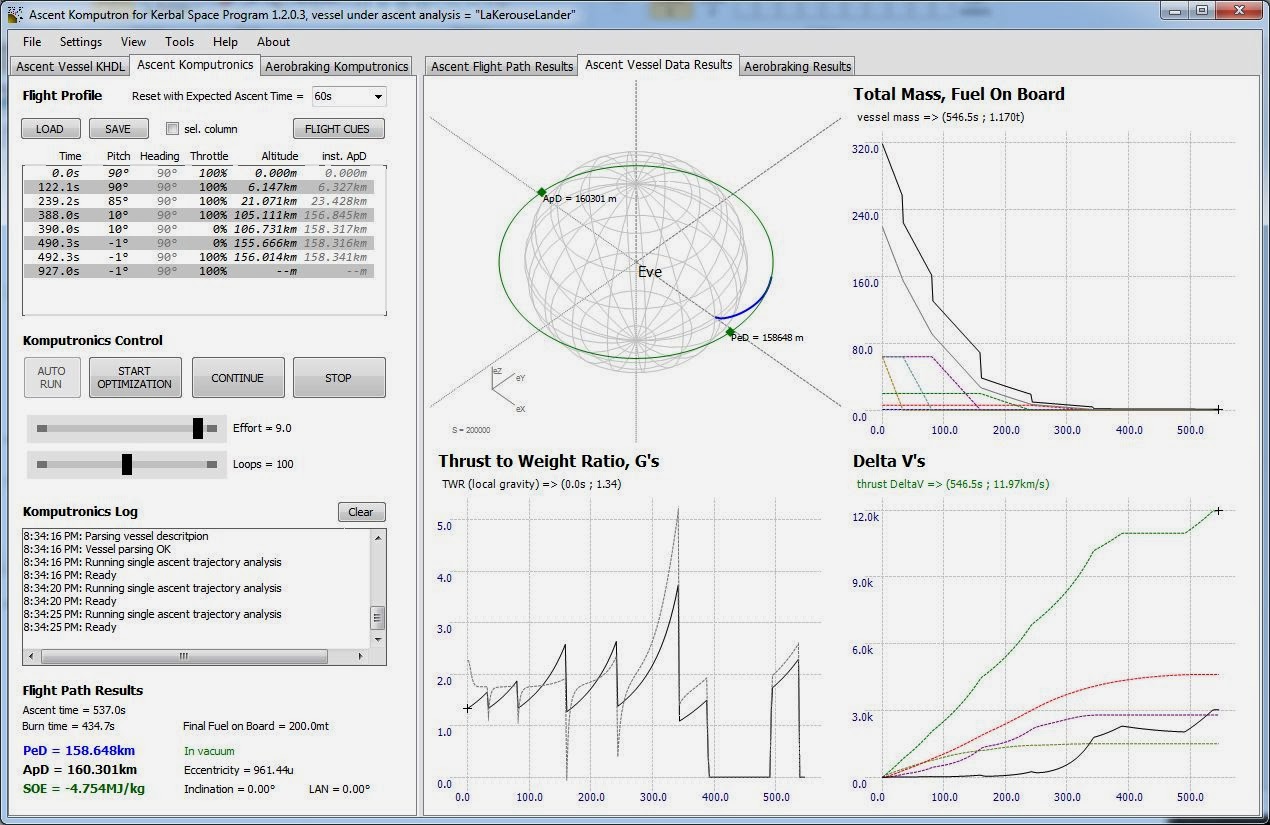
Le lanceur et son plan de vol ont été conçus à l'aide de l'Ascent Komputron:
Masse initiale: 896t, masse finale: 229t
Durée du vol: 6 min 6s (surface vers orbite de parking à 85 km)
DeltaV brut délivré: 4.5km/s, DeltaV net obtenu: 2.09km/s
Pertes de trainée: 0.56km/s, pertes de gravité: 1.16km/s pertes de désalignement: 0.68km/s
RPP moyen: 2.0, RPP minimal: 1.44
Réserve de carburant: 54t, soit 1.0km/s, 22% de marge
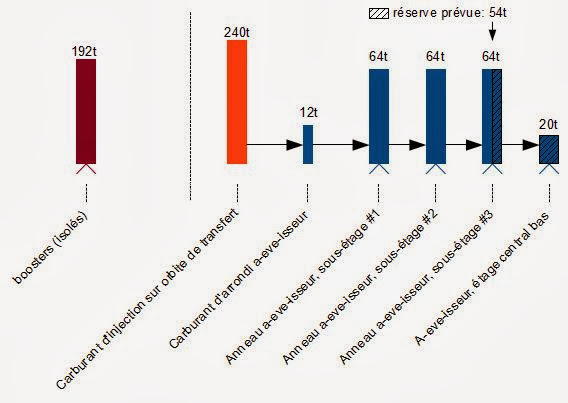
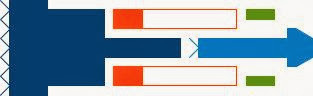
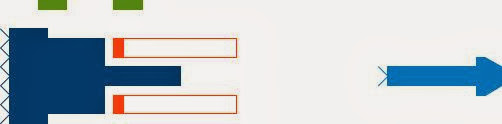
A noter que bien que l'intégrité de l'a-eve-isseur soit respectée, les moteurs de ses 1er et 2ème étages s'éteignent par manque de carburant au cours du vol. Ceci qui permet d'ailleurs d'éviter des accélérations verticales trop élevées pour l'équipage. Le réseau d'alimentation carburant est résumé ci-dessous:
 1.2.Ravitaillement sur orbite basse
1.2.Ravitaillement sur orbite basse
La technique choisie permet de satelliser en un coup l'ensemble de la charge utile sèche. L'emport de la totalité du carburant, soit une charge totale de 637t aurait mené à un lanceur très largement hors des limites fixées, voire même probablement non réalisable compte tenu de la technologie disponible. En conséquence un ravitaillement sur orbite de 408t est nécessaire, et se traduira par le lancement de deux ravitailleurs lourds de classe "KomitéDSoutien" (emport 280t), dont la mise aux normes 0.23 est en cours.
 1.3.Injection sur orbite de transfer
1.3.Injection sur orbite de transfer
Une fois le plein fait, l'injection de transfert vers Eve est obtenue en puisant dans les 240 tonnes de carburant réservées à cet effet.
DeltaV total disponible: 1.8km/s, prévu: 1.1 à 1.4km/s suivant la fenêtre de tir.
A noter que l'Ascent Komputron inclut un petit outil auxiliaire pour le calcul des DeltaV en espace libre.
1.4.Insertion orbitale à Eve
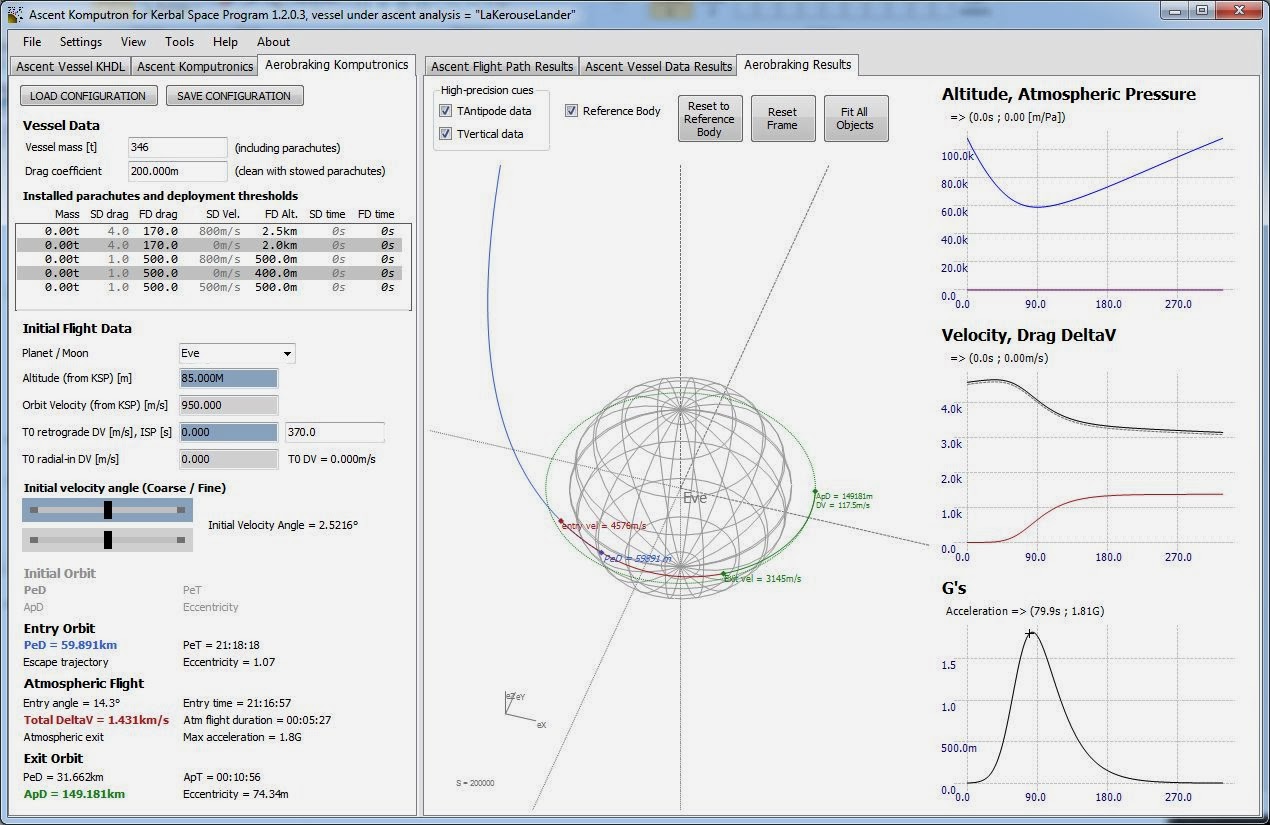
Cette manœuvre est une des plus critiques de la mission et exige un pilotage des plus précis. L'objectif est d'utiliser l'atmosphère d'Eve pour freiner d'environ 1.35km/s, puis de ressortir sur une orbite elliptique de transfert d'apoeve 160km et enfin d'effectuer une poussée de circularisation vers une orbite stable à 160 km. Une capture serait évidemment catastrophique, et un freinage insuffisant signifierait l'abandon de la mission avec utilisation anticipée du module de retour.
La mise sur orbite de parking est nécessaire pour la suite des opérations, consistant à désorbiter les sondes puis l'a-eve-isseur avec le plus de précision possible.
Les données prévisionnelles sont obtenues à l'aide de la fonction "Aerobreaking" de l'Ascent Komputron et seront mises à jour au cours de la mission en fonction des données transmises par les pilotes.
DeltaV de freinage: 1.35km/s pour une vitesse relative de 950m/s à l'entrée dans la zone d'influence d'Eve
Perieve initial: 60km
Décélération maximale: 1.8G
DeltaV de circularisation à 160km: 130m/s
Le carburant de transfert restant sera utilisé pour la désorbitation de l'a-eve-isseur.
1.5.Déploiement des sondes
Le déploiement des sondes aura lieu au cours des orbites suivantes, en visant des sites d'a-eve-isssage de plus basse altitude possible (probablement à proximité d'une mer). L'Ascent Komputron sera utilisé pour ajuster les données de ré-entrée.
Chaque sonde est conçue pour effectuer deux jeux de mesures: un en atmosphère et l'autre à la surface.

Le deuxième largage viendra compléter les données du premier (haute / basse atmosphère par exemple), ou sera utilisé comme secours en cas d'échec de la première sonde.
Finalement le module de retour et support sera détaché après embarquement du kerbonaute désigné dans l'a-eve-isseur. Le protocole retenu pour le choix est la "courte paille", car pouvant être réalisé en apesanteur et représentant une masse négligeable. La famille de l'heureux volontaire sera bien évidemment soutenue par le gouvernement en cas d'incident, hautement improbable bien évidemment.
1.6.A-eve-issage
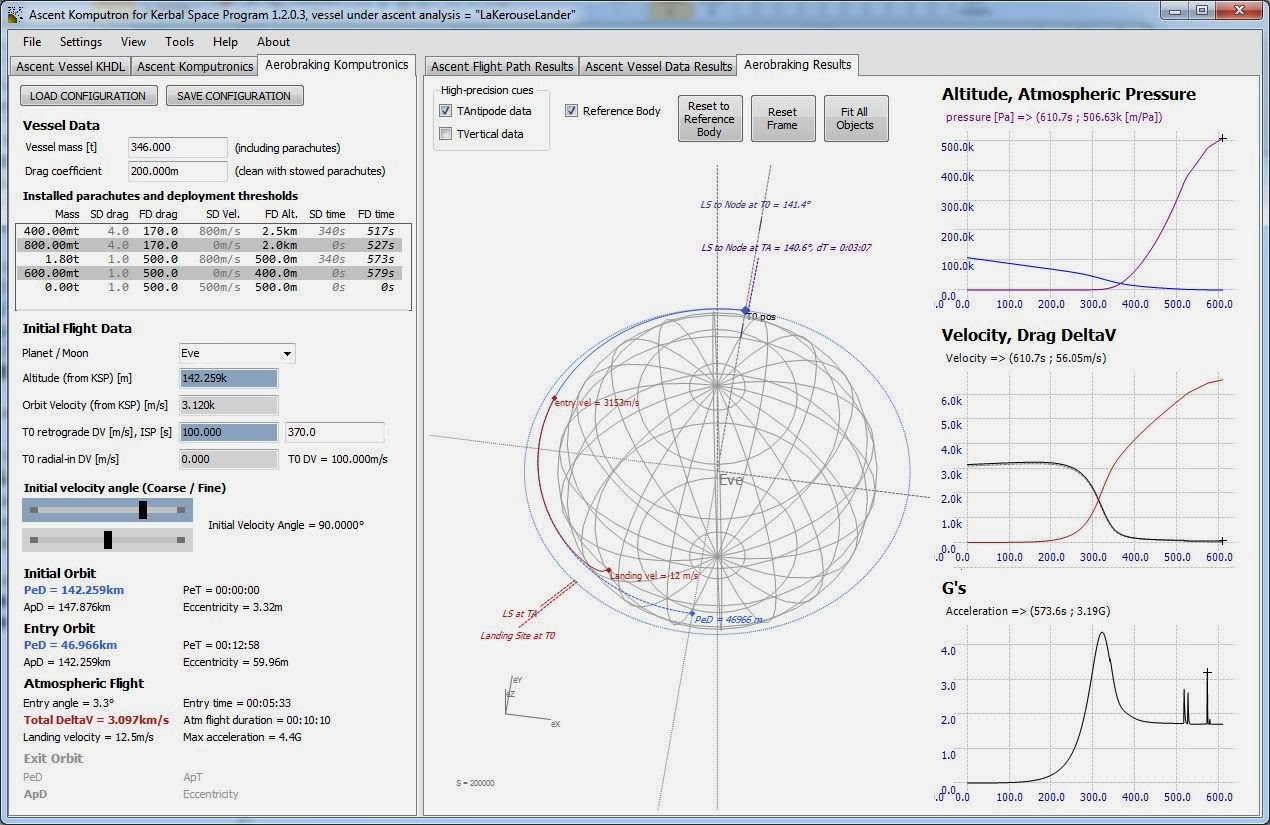
Là encore l'Ascent Komputron sera utilisé pour effectuer la manœuvre de ré-entrée la plus précise possible et a-eve-ir au plus près des sondes. En attendant les données finales, le dimensionnement des groupes de parachutes et leur séquence de déploiement a été optimisée pour minimiser les stress de décélération sur la structure du vaisseau.
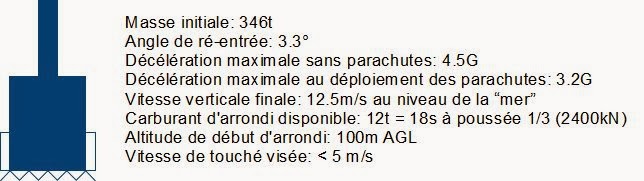
A noter que la masse de parachute nécessaire à l'obtention d'une vitesse verticale suffisamment faible a été jugée prohibitive et en contrepartie 12t de carburant ont été ajoutées pour l'arrondi final.
Le sang-froid du pilote sera primordial pour éviter un arrondi trop précoce et éviter de puiser sur le carburant prévu pour le re-décollage. Ceci est particulièrement critique pour un site d'a-eve-issage à moins de 500m ASL.
1.7.Récupération des données scientifiques
Pour le confort du kerbonaute, deux véhicules seront disponibles pour faciliter la récupération des données des sondes. Chacun d'entre eux est électriquement autosuffisant (le kerbonaute veillera à se munir d'un dosimètre) et est doté de puissants gyroscopes pour le remettre sur ses roues s'il venait à se retourner.
La vitesse maximale des rovers est d'environ 70km/h. La durée effective du trajet dépendra de la précision de l'a-eve-issage. Comme répété lors de l'entrainement de nos vaillants kerbonautes: "pas de bras... pas de chocolat"!
1.8.Re-décollage
Cette phase est tristement célèbre pour sa difficulté, Eve imposant une vitesse d'ascension très faible de par la densité de son atmosphère tout en exposant simultanément le vaisseau à une gravité 1.7 fois plus forte qu'à Kerbin. Ces deux facteurs se combinent pour faire s'envoler les pertes de trainée et de gravité.
Le profil de vol résultant est en conséquence très différent des standards habituels (très vertical et de longue durée), et le pilote devra veiller à respecter le plan de vol à la lettre.
La conception de l'a-eve-isseur et l'optimisation de son plan de vol ont été complètement réalisées à l'aide de l'Ascent Komputron, et constituent d'ailleurs la motivation initiale de son développement.
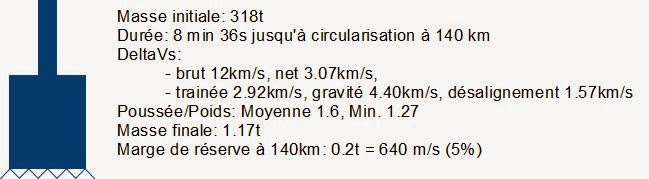
Pour faciliter la tâche du pilote autant que possible, le nombre d'étages a été volontairement limité à 6. Le premier largage intervient après 32s de vol, et devrait permettre au pilote de pleinement se concentrer sur l'établissement de la trajectoire initiale.
La masse finale sur orbite prévue est de 1.17t (dont 0.2t de réserve), amenant à un spectaculaire ratio entre masses initiale et finale approchant les 300.
1.9.Retour vers Kerbin
Les phases d'arrimages et de retour sont classiques. Seul le module de retour dispose de moteurs d'attitude et donc les phases finales seront à sa charge. Il dispose de suffisamment de réserve de DeltaV pour réaliser les phases d'approche également si nécessaire.

Masse initiale: 12.5t
DeltaV disponible: 3km/s
2.Préparations à Kerbin
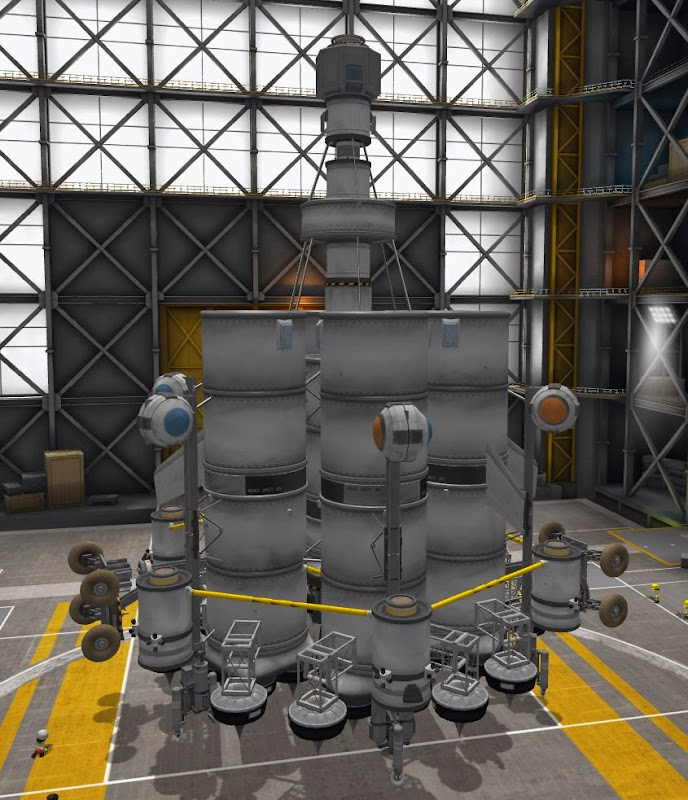
2.1.Assemblage de l'a-eve-isseur
Dernier étage (masse sèche 0.97t + 1t de carburant):
En configuration de re-décollage:
Le rapport poussée sur poids nécessaire est obtenu en ajoutant 2 moteurs auxiliaires qui s'ajoutent aux 4 principaux sur chaque élément de l'anneau.
Les T-45 centraux sont nécessaires pour fournir davantage de contrôle d'attitude au pilote tout en fournissant un léger surcroit de poussée.
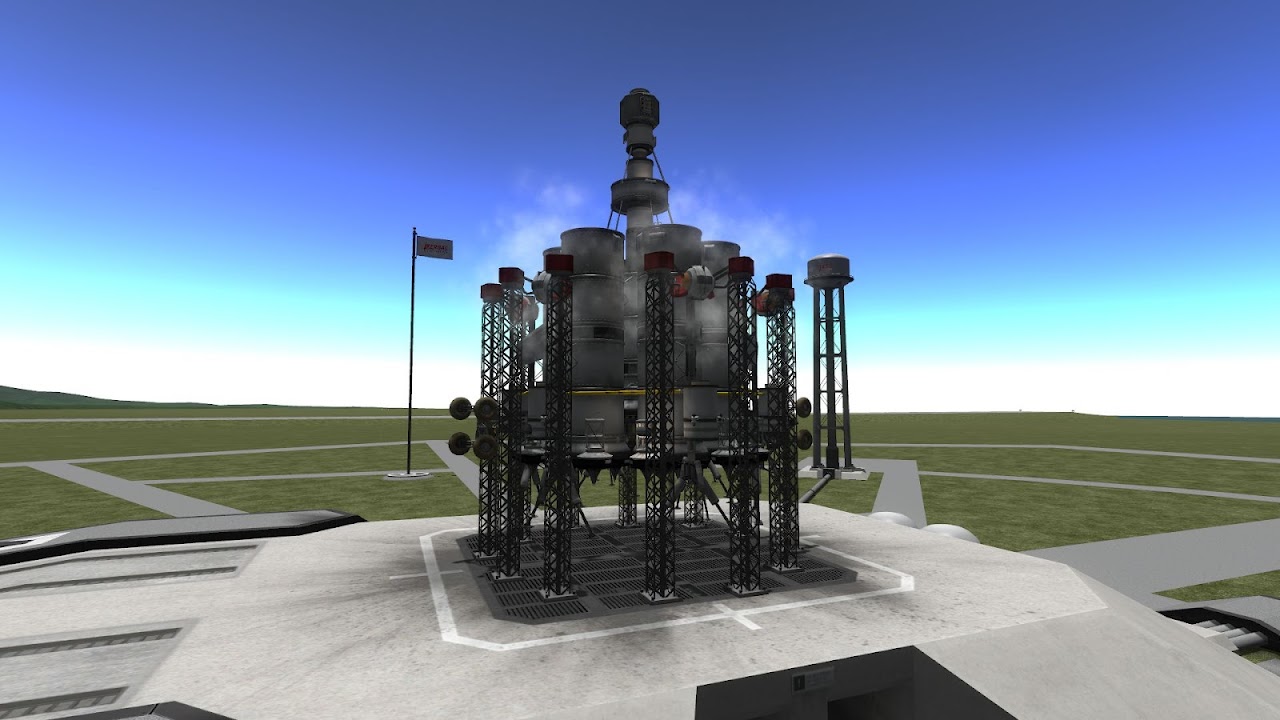
En configuration d'a-eve-issage:
Le train d'a-eve-issage, les rovers, parachutes et le carburant d'arrondi représentent environ 28t, dont le reliquat toujours solidaire du vaisseau est largué dès le décollage.
Test de robustesse de structure et d’absorption du choc d'a-eve-issage:
Le jeu consiste à laisser tomber le vaisseau train sorti depuis le plus haut possible et rien ne doit lâcher.
La configuration retenue utilise 12 jambes Mk1+ 12 jambes Mk2 dont les longueurs différentes tendent à étaler l'accélération subie.
2.2.Assemblage du lanceur
En configuration d'injection sur orbite de transfert:
En configuration de décollage:
Les boosters extérieurs sont ajoutés avec un léger angle de façon à ne pas endommager les éléments dans l'axe de leur flux de sortie. La perte de poussée correspondante est estimée à 0.3%. Leur éjection est assurée par 6 Sepratrons chacun, là encore pour protéger la structure. Ils emportent également 6 stabilisateurs en configuration canard (en avant du centre de gravité) pour faciliter le contrôle d'attitude de l'ensemble.
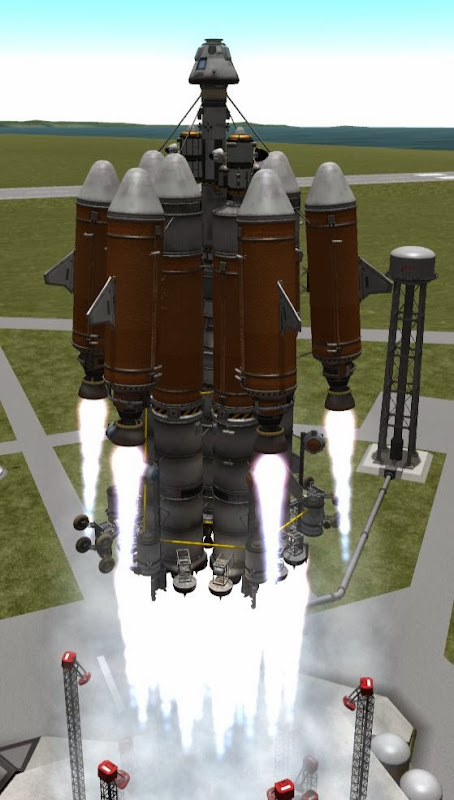
2.3.Vols d'essais à Kerbin
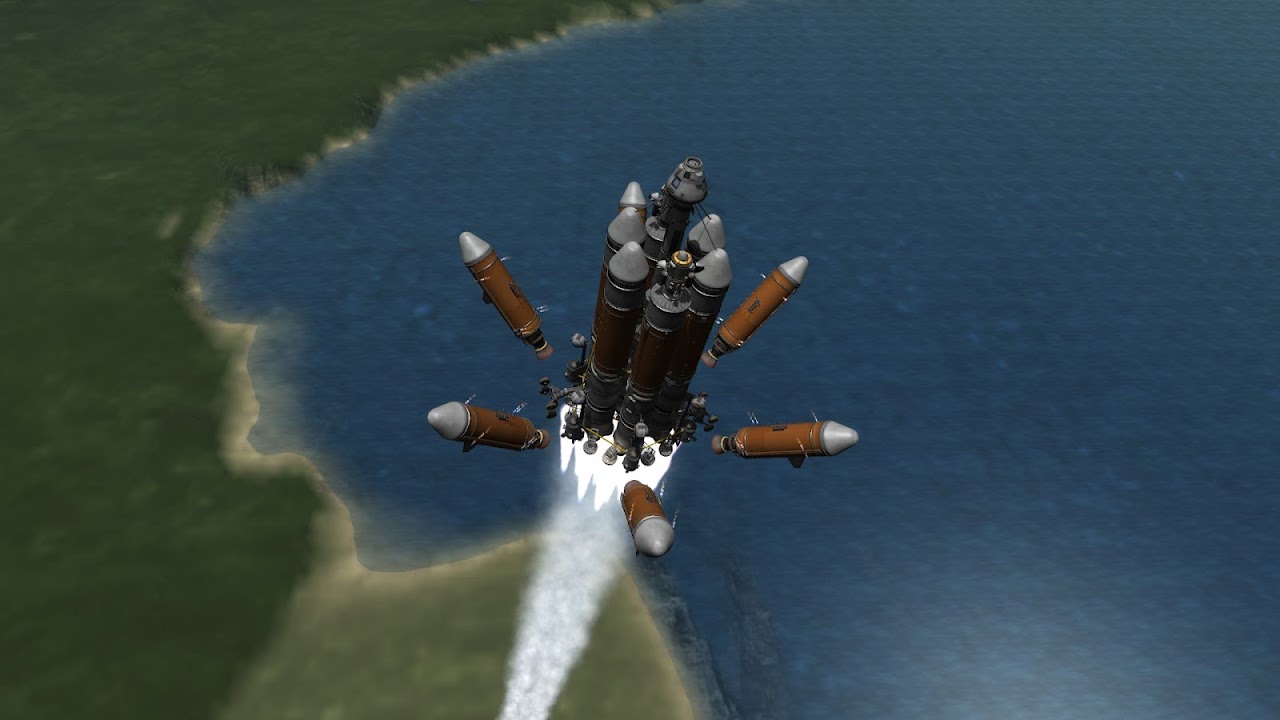
Décollage:
Séparation des boosters:
Sur orbite basse:
Ré-entrée de l'a-eve-isseur:
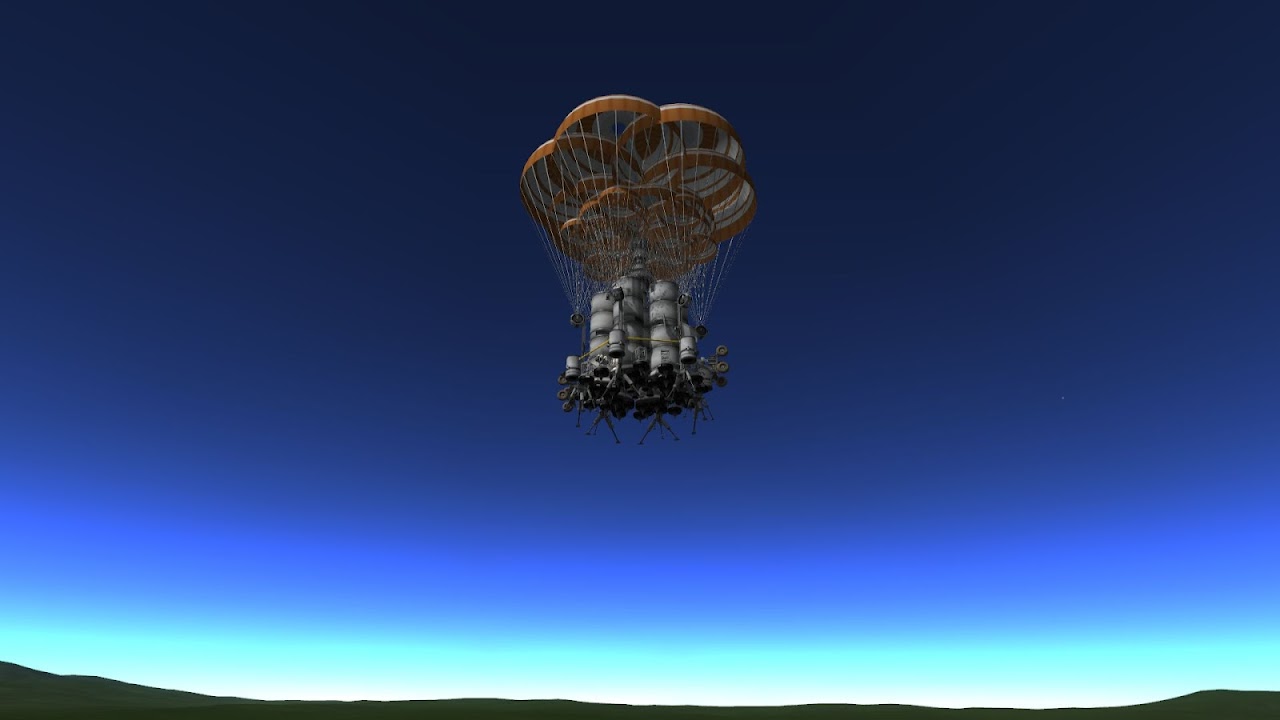
Début de séquence d'ouverture des parachutes:
Train sorti, tous parachutes déployés:
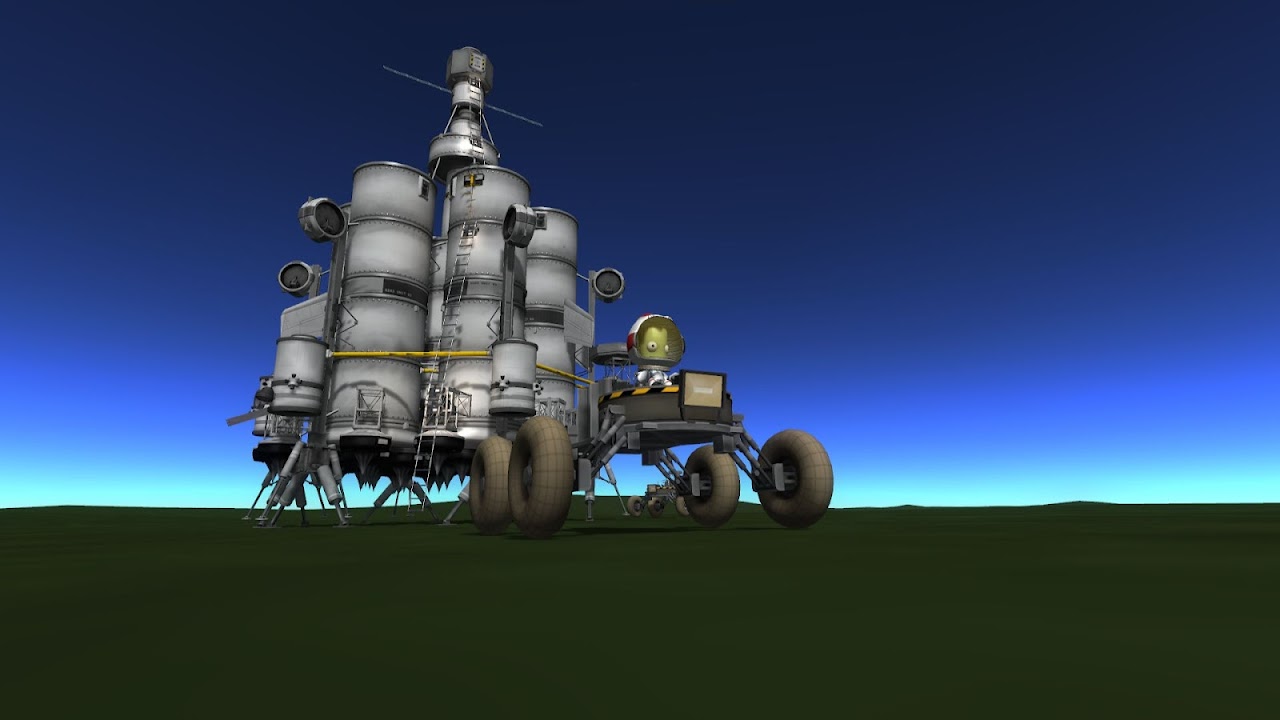
Posé, les spots sont très utiles pour estimer la proximité du sol en vue extérieure:
Echelle et rovers deployés:
Voilà pour aujourd'hui, et maintenant retour à la programmation du komputron (convertisseur des fichiers .craft de KSP)!
Remarques et suggestions toujours bienvenues!
Bons vols,
David