PRIME_BBCODE_SPOILER_SHOW PRIME_BBCODE_SPOILER: PREMIÈRE PHASE

après de très fin ajustement du lanceur (très kerbalien)

et voici le brave sur la zone de lancement

rapport d'équipage a 1m05

ouverture de la coiffe dans l'espace
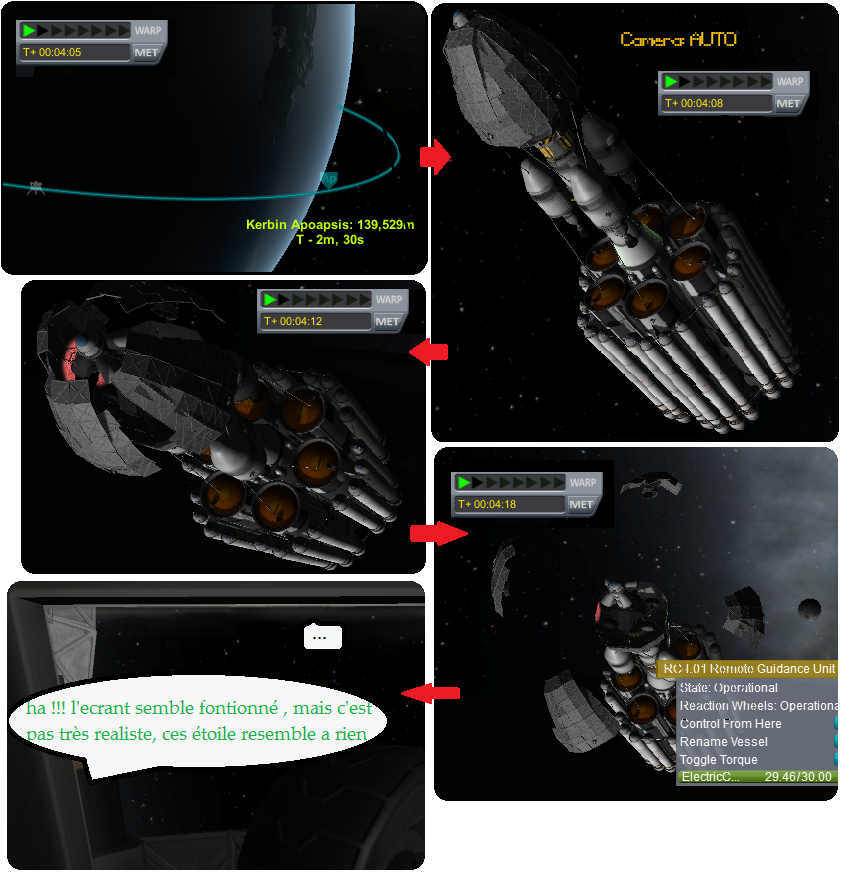
largage du lanceur
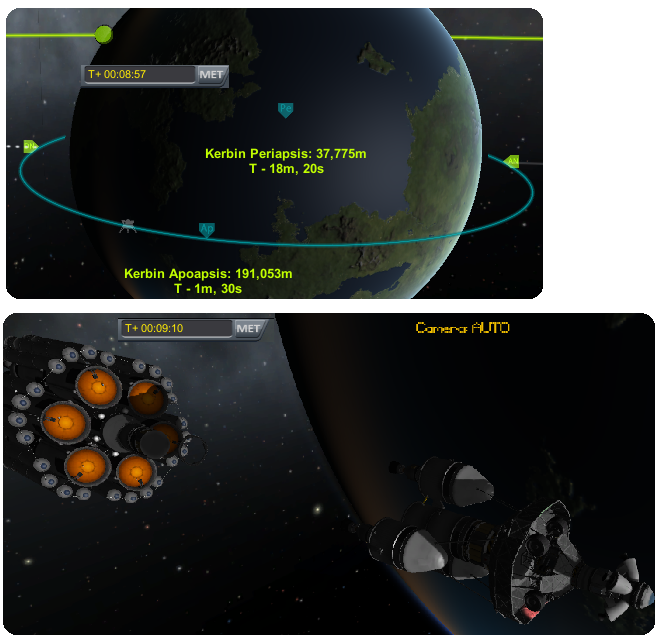
orbite circulaire autour de kerbin

PRIME_BBCODE_SPOILER_SHOW PRIME_BBCODE_SPOILER: DEUXIÈME PHASE
on sort de kerbin

petit rapport d'équipages

après un long moment a tourner dans le vide (l'objectif est de vous mettre cette chanson de merde dans la tête )
)
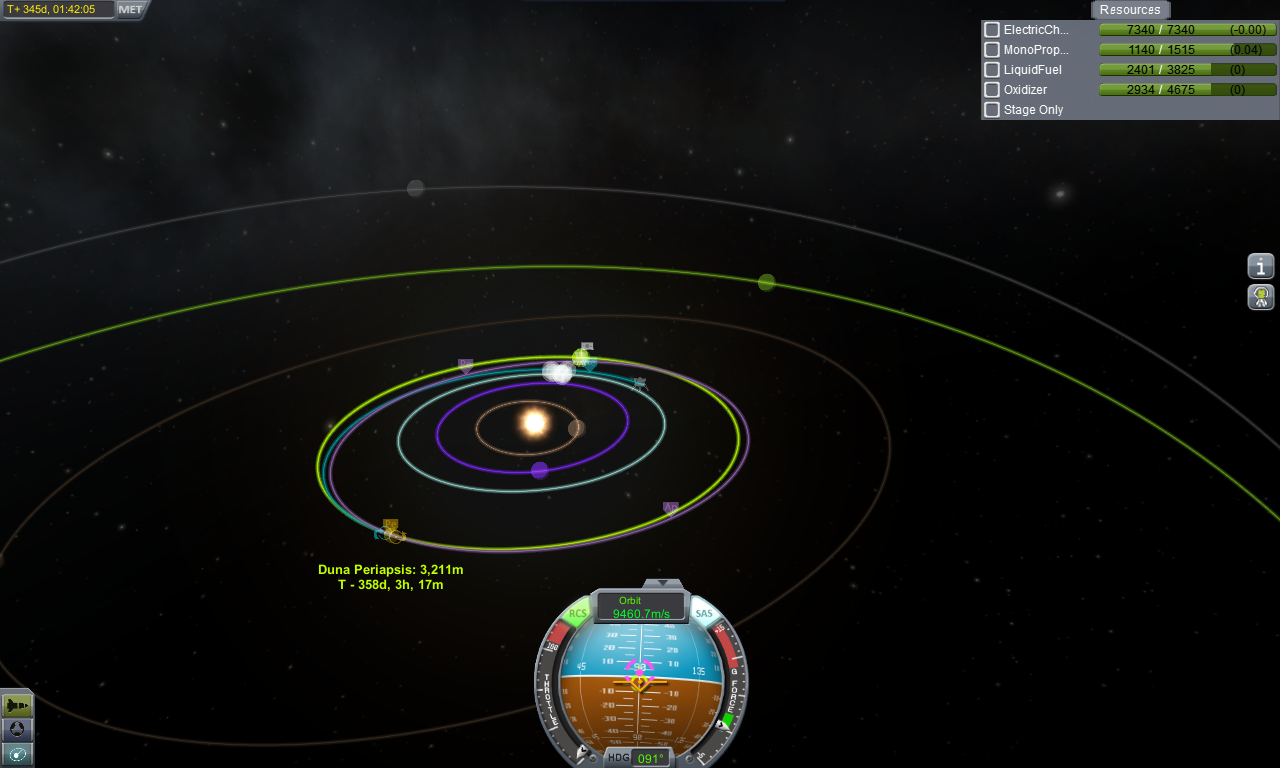
aérofrein sur duna un peut plus bas que se qui était conseiller mais toujours dans la norme qui était demander (<15km)

orbite a peu pres circulaire autour de duna (avec le point de manœuvre qui servira a donné un ordre d'idée de la direction (mais ne sera pas tout a fait suivit))

petit rapport d'équipages
après un long moment a tourner dans le vide (l'objectif est de vous mettre cette chanson de merde dans la tête
aérofrein sur duna un peut plus bas que se qui était conseiller mais toujours dans la norme qui était demander (<15km)
orbite a peu pres circulaire autour de duna (avec le point de manœuvre qui servira a donné un ordre d'idée de la direction (mais ne sera pas tout a fait suivit))
PRIME_BBCODE_SPOILER_SHOW PRIME_BBCODE_SPOILER: TROISIÈME PHASE
largage du module interplanair après avoir pris un trajectoire que je considérai comme idéal

séquence d'atterrissage en 3 image
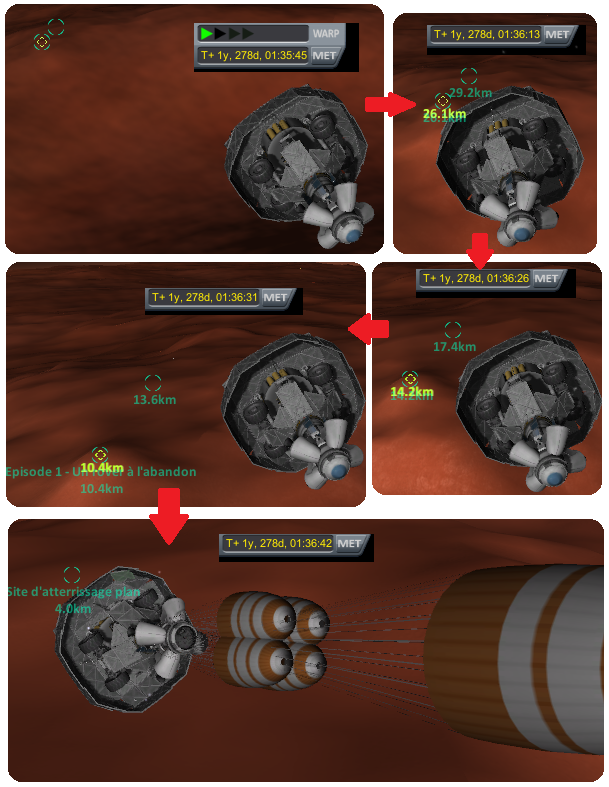

analyse de la situation ....

en approche de la cible

arrivé au target

séquence d'atterrissage en 3 image
analyse de la situation ....
en approche de la cible
arrivé au target
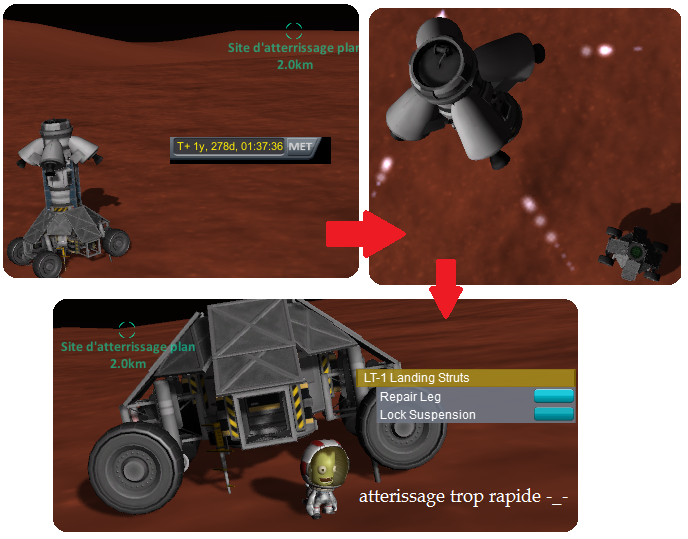
image transmit par lenzer kerman a bord du Tanngrisnir (l'autre rover de la GEC) ... en cours d'analyse .... nous enverrons peut être une mission de secours pour récupérer le rover ... heu je veut dire pilote